Filtro Digital BásicoLos filtros digitales están constituidos por una fórmula matemática y una máquina calculadora. El núcleo (o kernel) del filtro digital es la fórmula. La máquina puede ser un procesador DSP, un computador, un microcontrolador, el cerebro humano, etc. Uno de los filtros digitales más simples y útiles en Instrumentación es el filtro IIR pasabajos de primer orden [1], [2], definido por la ecuación de diferencia: 
Ejemplo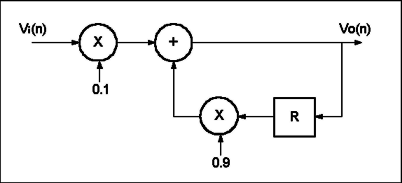 Sea
a
= 0.9. Entonces: y(n) = 0.1 · x(n) + 0.9 · y(n-1). Sea
a
= 0.9. Entonces: y(n) = 0.1 · x(n) + 0.9 · y(n-1). Es decir, la salida actual se obtiene sumando un 10 % de la entrada actual con un 90 % de la salida anterior. Se aprecia que la ecuación que define a este filtro le otorga gran importancia a la salida anterior y poca importancia a la entrada actual, generando un efecto de inercia característico de un filtro pasabajos. En la figura derecha se muestra el diagrama en bloques del filtro. Diseño en base a la constante de tiempoSea T [seg] la constante de tiempo deseada, y Fs [Hz] la frecuencia de muestreo utilizada. Entonces: 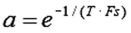 Diseño en base a la frecuencia de corteSea fc [Hz] la frecuencia de corte deseada, y Fs [Hz] la frecuencia de muestreo utilizada. Entonces:  Referencias
Juan Vignolo Barchiesi Marzo de 2008 |